DSO总结
论文《Direct Sparse Odometry》的阅读笔记。
1. Calibration
DSO中结合了几何校正和光度校正两个模型,其中几何校正为小孔相机模型。
光度校正
光度成像模型为
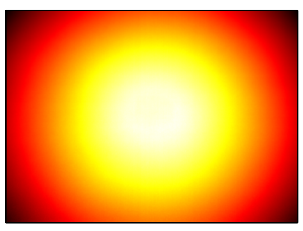
其中,$t_i$为曝光时间,$I_i(x)$为图像像素值,$G$为相机的响应函数,是相机的固有属性。$V$建模光学元件透镜的影响,即图像中心和边缘的亮度值不一致(vignetting),如下图所示。$B_i$是辐照度(irradiance),表示相机传感器接收到的入射光强。
<div align=center>
 </div>
因此对图像的光度校正模型为
</div>
因此对图像的光度校正模型为
该校正模型去除了vignetting的影响。(为什么最后不加上响应函数$G$?,即$I_i'(x)=G(t_iB_i(x))$)后文中的$I(x)$均指光度校正过的值。
几何校正和光度校正是怎么同时做的,先通过几何标定去除畸变,再给去除畸变的图像做光度标定? 只要光度标定参数是在去除畸变的基础上得到的,几何标定和光度标定就不会相互影响。2. 光度误差模型
对于host帧$i$中的点$\boldsymbol p$, 其在target帧$j$中的投影为$\boldsymbol p’$,则定义该点在这两帧中的光度误差为
其中$w_p=\frac{c^2}{c^2+||\nabla I_i(\boldsymbol p)||_2^2}$为权重,像素的梯度越高,则其权重越小。减小噪声点的影响?
$N_p$表示residual pattern,如下图所示,在每个点周围选择7个点,忽略右下角点是为了使用SSE加速。因此每个点的光度误差是8个点的误差之和。
<div align=center>
 </div>
为了处理曝光时间未知的情况,添加了一个仿射亮度变换函数(affine brightness transfer function)$e^{-a_i}(I_i-b_i)$。(通过该函数来大致拟合成像过程,从而消除光度误差, $e^{-a}$用于校正曝光时间、$b_i$用于校正图像亮度基底的影响[5])
</div>
为了处理曝光时间未知的情况,添加了一个仿射亮度变换函数(affine brightness transfer function)$e^{-a_i}(I_i-b_i)$。(通过该函数来大致拟合成像过程,从而消除光度误差, $e^{-a}$用于校正曝光时间、$b_i$用于校正图像亮度基底的影响[5])
对于未进行光度标定的图像,则$G=V=t=1$,即$I_i^{‘}(x)=I_i(x)$。
对于已进行光度标定的图像,$a,b$为0或很小的数,因此上式等价于
则最终计算的是两张图像之间的辐照度($B$)的误差。 总的光度误差为
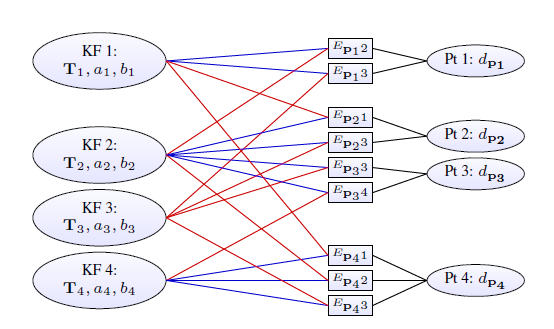
其中,$F$表示所有帧(key frame还是active frame还是所有普通的frame?)的集合,$P_i$表示帧$F_i$中的所有点(candidate point?active point?),$obs(\boldsymbol p)$表示所有观测到$\boldsymbol p$点的其他帧。后续通过滑动窗口最小化该误差值,则$F$是滑动窗口内的所有帧,盲猜帧和点都是active。
最终构建的因子图如下所示:
<div align=center>
 </div>
在曝光时间已知并且已进行光度标定的情况下,还会加入一个正则项用来约束$a,b$的大小(此时$a,b$的作用已由光度标定完成):
</div>
在曝光时间已知并且已进行光度标定的情况下,还会加入一个正则项用来约束$a,b$的大小(此时$a,b$的作用已由光度标定完成):
3. Windowed Optimization & Marginalization
滑动窗口优化使用GN方法,则
$\boldsymbol W$是权重矩阵(怎么得到的?)(公式1中的$w_p$),$\boldsymbol J$的推导见下一节。
$\boldsymbol J_k$的形式为
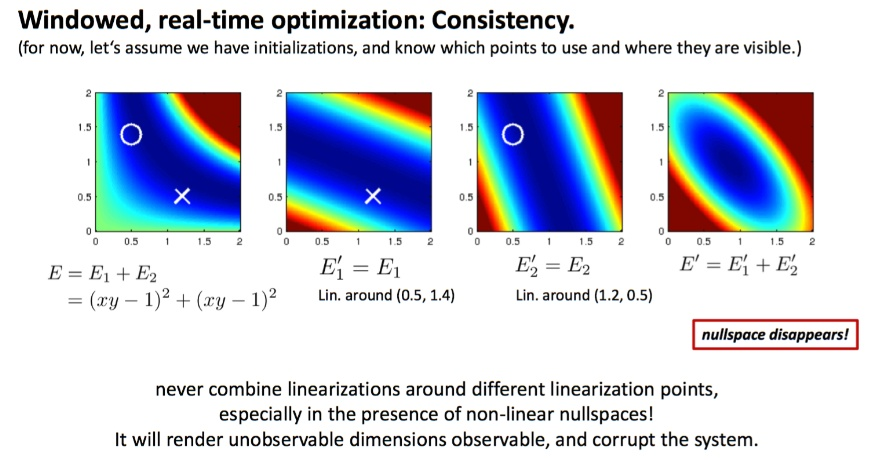
使用滑动窗口时,为了减小计算量,需要将部分变量移出窗口,若是直接丢掉这些变量,则会破坏原有的约束关系,损失约束信息,因此需要使用边缘化,将约束信息转化为待优化变量的先验分布,实际上是一个从联合概率密度分布获得边缘概率密度分布的过程[6]。被边缘化的变量可能和剩余的变量之间有约束,因此若直接丢弃该变量,则约束也被舍弃了,在后续的优化过程中势必会破坏该约束,而边缘化是将该约束信息转换为剩余变量的先验信息[7]。也是由于该先验信息的存在而需要使用FEJ策略已保持一致性。例如,当前优化状态量为$[x, y]$,需要边缘化$x$,此时$y$在$(x_0, y_0)$处线性化,则得到一个先验的Hessian矩阵$H_0$,此时新加入变量$z$,则优化变量变为$[y,z]$,但是此时$y$已经更新,因此再次优化的时候会在$(y_1,z_0)$处进行线性化,得到新的Hessian矩阵$H_1$,则求解的增量方程变为$(H_0+H_1)x=b$[10]。所以$z$是在$(y_1,z_0)$处线性化,而由于先验$H$的存在,$y$不是在该点线性化,因此导致不一致性的问题?但是用了FEJ以后$y$和$z$仍然不是在同一点线性化的。不同的线性化点并不是相对于不同的变量而言的,而是指函数两次线性化时的点(变量的值)是相同的,若在不同的点线性化两次后的加和就可能导致零空间的降维。如下图所示,$E_1$和$E_2$在不同的点线性化后使原函数的零空间消失。
EFJ如何解决这个问题? $H_0$只包含先验信息,因此只有在上一次边缘化时增加了先验的变量才有值,其余均为0,所以加上$H_0$不会对其他变量有影响,因此下一次优化时,只需这些变量在初始值处线性化即可,迭代过程不更新,优化完成后再更新。<div align=center>
 </div>
</div>
误差函数$r_k$中存在非线性零空间(nullspace)(即该变量的变化不会影响$r_k$的变化,DSO中是尺度和绝对位姿),因此若在不同的点对这些变量进行线性化,则会导致零空间的降维,相当于引入了错误的信息,使不可观状态量变得可观了。为了解决这个问题,需要对这些不可观变量同时进行线性化,即First Estimate Jacobians,$\boldsymbol J_{geo},\boldsymbol J_{photo}$均在$\boldsymbol \xi_0$处进行计算,每次迭代时只更新$x$,一次优化完成后更新$\xi_0$。$\boldsymbol J_{geo},\boldsymbol J_{photo}$是足够光滑的,因此实际使用中,效果很好。
边缘化某一帧时,首先边缘化该帧中的所有active point以及所有最近两帧中未观测到的点,该帧的active point在其他帧中的observation直接丢弃(怎么直接丢弃?直接将$H$中对应的行列置为0?)(直接置为0。)
问题:- 只在一次优化的6次迭代中使用FEJ,下次优化时会重新计算Jacobian矩阵?
- 先验Hessian矩阵$H$是一个单独的矩阵?$H$会在整个程序运行期间一直维护,每次进行边缘化的时候进行累加?还是只保留最新的?
- 边缘化旧的状态量,添加新的状态量和优化的时机?创建了新的关键帧后,需要边缘化旧的,优化怎么进行?进行一次优化,前几次迭代边缘化,后几次迭代优化新加入的状态?(错,一次迭代中的$H$是不变的?!)或一次优化中不考虑新加入的变量,只是边缘掉旧的状态量,更新剩余变量后直接把新加入的状态量加入到窗口中,而不进行优化,下一次边缘化的时候再优化?(感觉也不太可能)或者进行两次优化,第一次边缘化,第二次优化新变量?
- 不同的线性化点是如何出现的?
- 先验Hessian矩阵怎么计算的?
4. Jacobian矩阵推导
残差公式为:
下标$i$表示host frame, $j$表示target frame。
则
其中,$\boldsymbol \delta$包括两部分,$\boldsymbol \delta_{geo}$:几何参数($\boldsymbol T_i, \boldsymbol T_j, d, \boldsymbol{c}$)和$\boldsymbol \delta_{photo}$:光度参数($a_i,a_j,b_i,b_j$)。
4.0 图像梯度
$$ \begin{equation} \frac{\partial I_j}{\partial \boldsymbol p'}=[I_u, I_v,0] \end{equation} $$$I_u,I_v$分别表示图像在$u,v$方向的梯度。
4.1 光度参数($a_i,a_j,b_i,b_j$)
光度参数直接求导即可。
$$ \begin{align} \frac{\partial r_k}{\partial a_i} &= \frac{t_je^{a_j}}{t_ie^{a_i}}(I_i[\boldsymbol p]-b_i) \\ \frac{\partial r_k}{\partial a_j} &= -\frac{t_je^{a_j}}{t_ie^{a_i}}(I_i[\boldsymbol p]-b_i) \\ \frac{\partial r_k}{\partial b_i} &= \frac{t_je^{a_j}}{t_ie^{a_i}} \\ \frac{\partial r_k}{\partial b_j} &= -1 \end{align} $$4.2 几何参数($\boldsymbol T_i, \boldsymbol T_j, d, \boldsymbol c$)
4.2.1 对$\boldsymbol T_j,\boldsymbol T_i$的偏导
假设host frame中的一个像素点为$\boldsymbol p=[u_i, v_i, 1]^T$,深度为$d_i$, 记$\rho_i=1/d_i$。该点在target frame中的投影为
$\boldsymbol P_i = [X_i, Y_i, Z_i]$为该点在host坐标系下的空间坐标。
$\boldsymbol P_j = [X_j, Y_j, Z_j]$为该点在frame坐标系下的空间坐标。
$\boldsymbol T_i, \boldsymbol T_j$的李代数表示分别为$\boldsymbol \xi_{i},\boldsymbol \xi_{j}$。
由[1] P163-164可知:
$$ \begin{equation} \frac{\partial \boldsymbol p'}{\partial \boldsymbol \xi_j} = \left[ \begin{matrix} f_x\frac{1}{Z_j} & 0 & -f_x\frac{X_j}{Z_j^2} & -f_x\frac{X_jY_j}{Z_j^2} & f_x+f_x\frac{X_j^2}{Z_j^2} & -f_x\frac{Y_j}{Z_j} \\ 0 & f_y\frac{1}{Z_j} & -f_y\frac{Y_j}{Z_j^2} & -f_y-f_y\frac{Y_j^2}{Z_j^2} & f_y\frac{X_jY_j}{Z_j^2} & f_y\frac{Y_j}{Z_j} \\ 0 & 0 & 0 & 0 & 0 & 0 \end{matrix} \right] \label{part_p_tj} \end{equation} $$此处需要注意,[1]中$\frac{\partial\mathbf{TP}}{\partial\mathbf\xi}$中$\mathbf T$是相对于世界坐标系的绝对位姿,而本文中$\mathbf p’=\rho_j\mathbf{K}\mathbf T_{ji}\mathbf P_i$中的$\mathbf T_{ji}$是相对位姿。
可以通过如下变换将相对位姿变换矩阵变为绝对变换矩阵。
或者利用[3]中的结论:
这里省略了其次坐标到非齐次坐标的转换。上式中1为对绝对位姿的偏导,结果为\ref{part_p_tj},根据[3]中结论$\frac{\partial\boldsymbol{\xi}_{ji}}{\partial\boldsymbol\xi_j}=\boldsymbol I$,即2为单位阵$\boldsymbol I$,因此可以得到式\ref{part_p_tj}。
同样由[3],已知
所以
$$ \begin{align} \frac{\partial\boldsymbol p'}{\partial\boldsymbol\xi_i} &= \frac{\partial\rho_j\boldsymbol{KT}_{ji}\boldsymbol P_i}{\partial\boldsymbol\xi_i} \\ &= \frac{\partial\rho_j\boldsymbol{KT}_{ji}\boldsymbol P_i}{\partial\boldsymbol\xi_{ji}}\frac{\partial\boldsymbol\xi_{ji}}{\partial\boldsymbol\xi_{i}} \\ &= - \left[ \begin{matrix} f_x\frac{1}{Z_j} & 0 & -f_x\frac{X_j}{Z_j^2} & -f_x\frac{X_jY_j}{Z_j^2} & f_x+f_x\frac{X_j^2}{Z_j^2} & -f_x\frac{Y_j}{Z_j} \\ 0 & f_y\frac{1}{Z_j} & -f_y\frac{Y_j}{Z_j^2} & -f_y-f_y\frac{Y_j^2}{Z_j^2} & f_y\frac{X_jY_j}{Z_j^2} & f_y\frac{Y_j}{Z_j} \\ 0 & 0 & 0 & 0 & 0 & 0 \end{matrix} \right] \left[ \begin{matrix} \boldsymbol R_{ji} & \boldsymbol{t_{ji}^\wedge R_{ji}} \\ \boldsymbol 0 & \boldsymbol R_{ji} \end{matrix} \right] \end{align} $$4.2.2 对逆深度的导数
定义
其中$[u, v, 1]^T$为归一化平面的坐标,则有:
且
记$\boldsymbol a=\boldsymbol R_{ji}\boldsymbol K^{-1}\boldsymbol p$,则
即
其中,$\boldsymbol{a,t}$的上标$i$表示取第$i$行。消去$\rho_j$,则
其中,第三个等号由公式\ref{u_v_1}的3式而来。
同理
由公式\ref{p_asp}可得:
所以
$$ \begin{align} \frac{\partial \boldsymbol p'}{\partial \rho_i} &=\left[ \begin{matrix} \frac{\partial u_j}{\partial u}\cdot\frac{\partial u}{\partial \rho_i} \\ \frac{\partial v_j}{\partial v}\cdot\frac{\partial v}{\partial \rho_i} \\ 0 \end{matrix} \right] \\ &= \left[ \begin{matrix} f_x(\boldsymbol t_{ji}^1-u\boldsymbol t_{ji}^3)\frac{\rho_j}{\rho_i} \\ f_y(\boldsymbol t_{ji}^2-u\boldsymbol t_{ji}^3)\frac{\rho_j}{\rho_i} \\ 0 \end{matrix} \right] \end{align} $$通过式\ref{u_v_1}消去$\rho_i$,则
同理
所以
$$ \begin{align} \frac{\partial \boldsymbol p'}{\partial \rho_j} &=\left[ \begin{matrix} \frac{\partial u_j}{\partial u}\cdot\frac{\partial u}{\partial \rho_j} \\ \frac{\partial v_j}{\partial v}\cdot\frac{\partial v}{\partial \rho_j} \\ 0 \end{matrix} \right] \\ &= \left[ \begin{matrix} f_x(\boldsymbol t_{ji}^1-u\boldsymbol t_{ji}^3)\frac{1}{1-\rho_j\boldsymbol t_{ji}^3} \\ f_y(\boldsymbol t_{ji}^2-u\boldsymbol t_{ji}^3)\frac{1}{1-\rho_j\boldsymbol t_{ji}^3} \\ 0 \end{matrix} \right] \end{align} $$4.2.3 对内参的偏导
对$f_x, f_y$:
易得$\frac{\partial v}{\partial f_x}=0$, 所以
由式\ref{u}可知
其中$\boldsymbol r_1=\boldsymbol R_{ji}^1, t_1=\boldsymbol t_{ji}^1,\boldsymbol r_3=\boldsymbol R_{ji}^3, t_3=\boldsymbol t_{ji}^3$,则
所以
$$ \begin{align} \frac{\partial u}{\partial f_x}&=-\frac{\rho_j}{\rho_i}(r_{11}-ur_{31})uf_x^{-1} \\ \frac{\partial \boldsymbol p'}{\partial f_x}&= \left[ \begin{matrix} u-u\frac{\rho_j}{\rho_i}(r_{11}-ur_{31}) \\ 0 \\ 0 \end{matrix} \right] \end{align} $$同理可得
$$ \begin{equation} \frac{\partial \boldsymbol p'}{\partial f_y}= \left[ \begin{matrix} 0 \\ v-v\frac{\rho_j}{\rho_i}(r_{21}-vr_{31}) \\ 0 \end{matrix} \right] \end{equation} $$对$c_x, c_y$:
所以
$$ \begin{equation} \frac{\partial \boldsymbol p'}{\partial c_x}= \left[ \begin{matrix} 1-\frac{\rho_j}{\rho_i}(r_{11}-ur_{31})\\ 0 \\ 0 \end{matrix} \right] \end{equation} $$同理可得
$$ \begin{equation} \frac{\partial \boldsymbol p'}{\partial c_y}= \left[ \begin{matrix} 0 \\ 1-\frac{\rho_j}{\rho_i}(r_{21}-ur_{31})\\ 0 \end{matrix} \right] \end{equation} $$5. Visual Odomtery Front-end
前端负责帧和点的管理(选取及边缘化,移除outlier及遮挡点),并且为新加入的变量提供优化初值。
5.1 帧管理
滑动窗口中总是保持7个active frame,新来的帧将根据这些active frame进行tracking,然后决定该帧是否成为一个关键帧,若否,则丢弃该帧,否则优化光度误差,最后边缘化其他帧。
- Frame tracking 新关键帧创建后,将其他active frame中的active point全部投影到最新关键帧,新来的frame只需根据这一帧进行tracking,初始值根据匀速运动模型和图像金字塔(图像金字塔的作用?)得到,若tracking失败,则在27个不同的方向重新初始化(?)。
- 关键帧的选择
策略:首先尽可能多的创建关键帧,然后再边缘化掉。
选取准则:
- 视角变换大
- 平移较大
- 曝光时间变化大 最终通过这三个准则的加权分数决定是否创建新的关键帧。
- 关键帧的边缘化
- 最新两帧一定保留。
- 某一帧中的active point中少于5%被最新的active frame观测到,则边缘化该帧。
- 边缘化掉离最新关键帧远,但离其他关键帧近的关键帧。
5.2 点管理
总的active point为2000个,使他们尽可能在整个空间及active frame上均匀分布。首先在每个新的关键帧上选择2000个候选点,并且通过后续的tracking得到初始深度值,然后选择部分候选点成为active point。
- 候选点的选择 尽可能选择在图像中分布均匀,并且梯度较大的点。
- 候选点的tracking 沿极线搜索,最小化光度误差得到深度值和associated variance(?)。
- 候选点激活 将所有active point投影到新的关键帧上,选择与已存在的active point距离最大的点激活(具体策略?与一个点还是所有点距离之和?)。
[8]推导了如何从多元高斯分布联合盖概率密度$p(a,b)$得到部分变量的条件概率密度$p(a|b)$。 [9]说明了多元高斯分布中协方差矩阵的逆$\sum^{-1}$等于Hessian矩阵$H$。
参考
- 高翔, 张涛, 刘毅, 颜沁睿, 视觉SLAM十四讲:从理论与实践,电子工业出版社, 2017
- DSO详解
- Adjoint of SE(3)
- 闲话矩阵求导
- DSO之光度标定
- 滑窗优化、边缘化、舒尔补、FEJ及fill-in问题
- DSO 中的Windowed Optimization
- Conditional and marginal distributions of a multivariate Gaussian
- Relationship between the Hessian and Covariance Matrix for Gaussian Random Variables
- 如何理解EKF中的consistency? - jing胖的回答